

 高速数据采集专业产商
高速数据采集专业产商

一、概述:
项目背景:
该项目主要通过激光器和激光接收机实时检测目标的XYZ方向上的相对速度,并将3个方向的速度值矢量合成后,通过串口上报给主机。
系统原理如下:
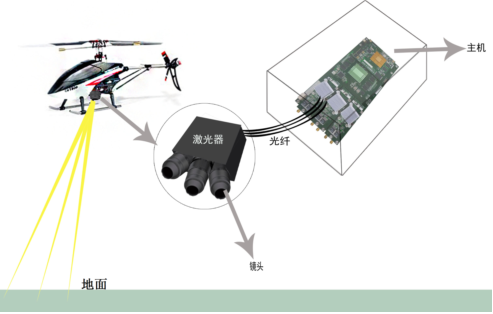
通过特殊的调制信号激励激光器,发射连续波激光。
同时在不同阶段接收从目标反射回的信号并通过高速ADC采集这些信号。
FPGA实时进行FFT计算,根据FFT结果比较不同阶段的频偏和符号。
根据多普勒效应,通过频偏大小和频偏方向,就能计算出目标的相对速度和方向。
3个通道通过不同角度的合成,可以最终计算出目标的相对矢量速度。
通过串口将速度数据传到上位机。
系统原理框图如下:

我们面临的挑战:
由于物体相对速度较快,达到125m/s;对应的信号带宽为DC-250MHz左右,需要1GHz进行高速采集。
同时对1Gsps的数据量进行最大32K点FFT时,数据覆盖率达50%上。此时单一的FFT模块在FPGA中计算时间不够,需要4路FFT并行计算;逻辑设计难度较大。
要求测试距离在3KM以上。由于激光在大气中的衰减比较严重,同时受到大气的干扰也比较严重。致使回波信号比较弱,同时不稳定。
解决方案:
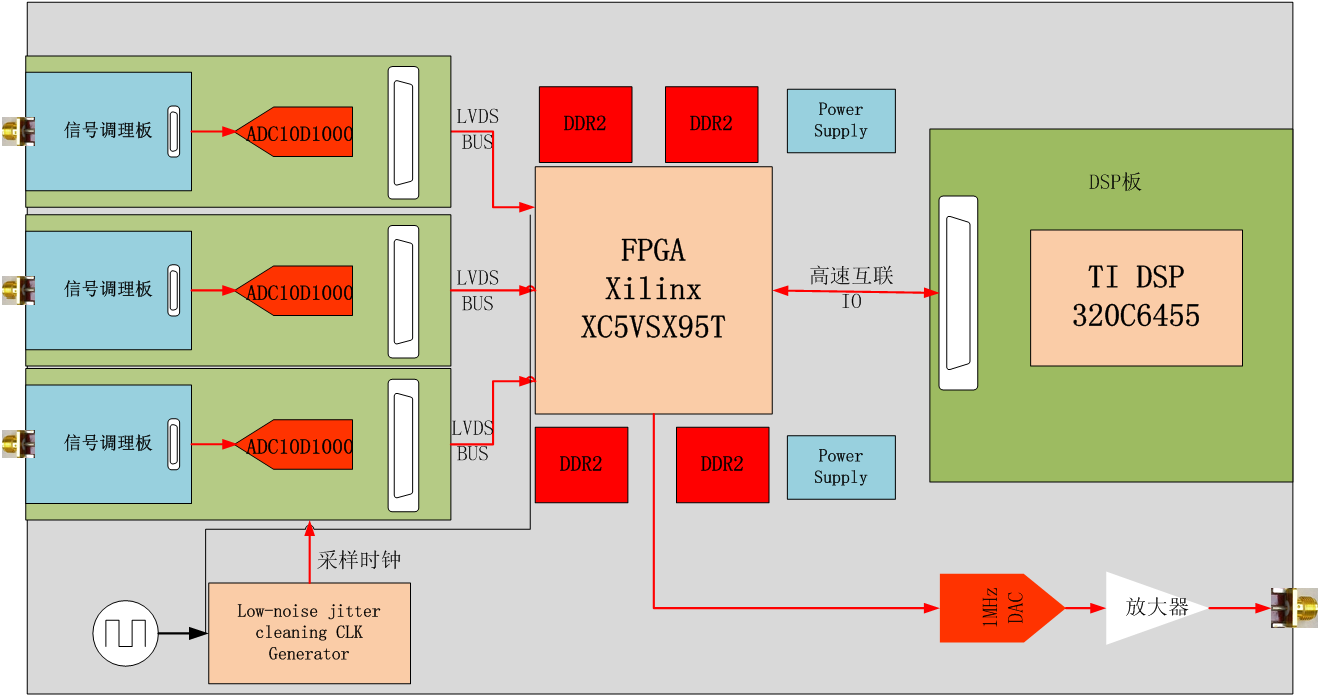
根据实际系统和算法处理精度要求,硬件系统采用如下设计:
10 bit 1GSPS ADC,三通道同步采集。
低噪声模拟前端,支持程控增益放大,50Ω阻抗 SMA接口。
模拟带宽DC-250MHz。
板载1024MB DDR3内存。
高稳定度,超低低抖动时钟发生器。
低噪声电源设计。
采用Xilinx XC5VSX95T FPGA,FPGA实现实时FFT和信号检测算法功能。
TI C6455 DSP,工作频率1GHz,用于3波束速度合成算法和FPGA控制。
两个RS422/RS485接口。
二、系统整体框图如下:

系统整机的实物图

系统整机飞行测试
三、信号的实时处理:
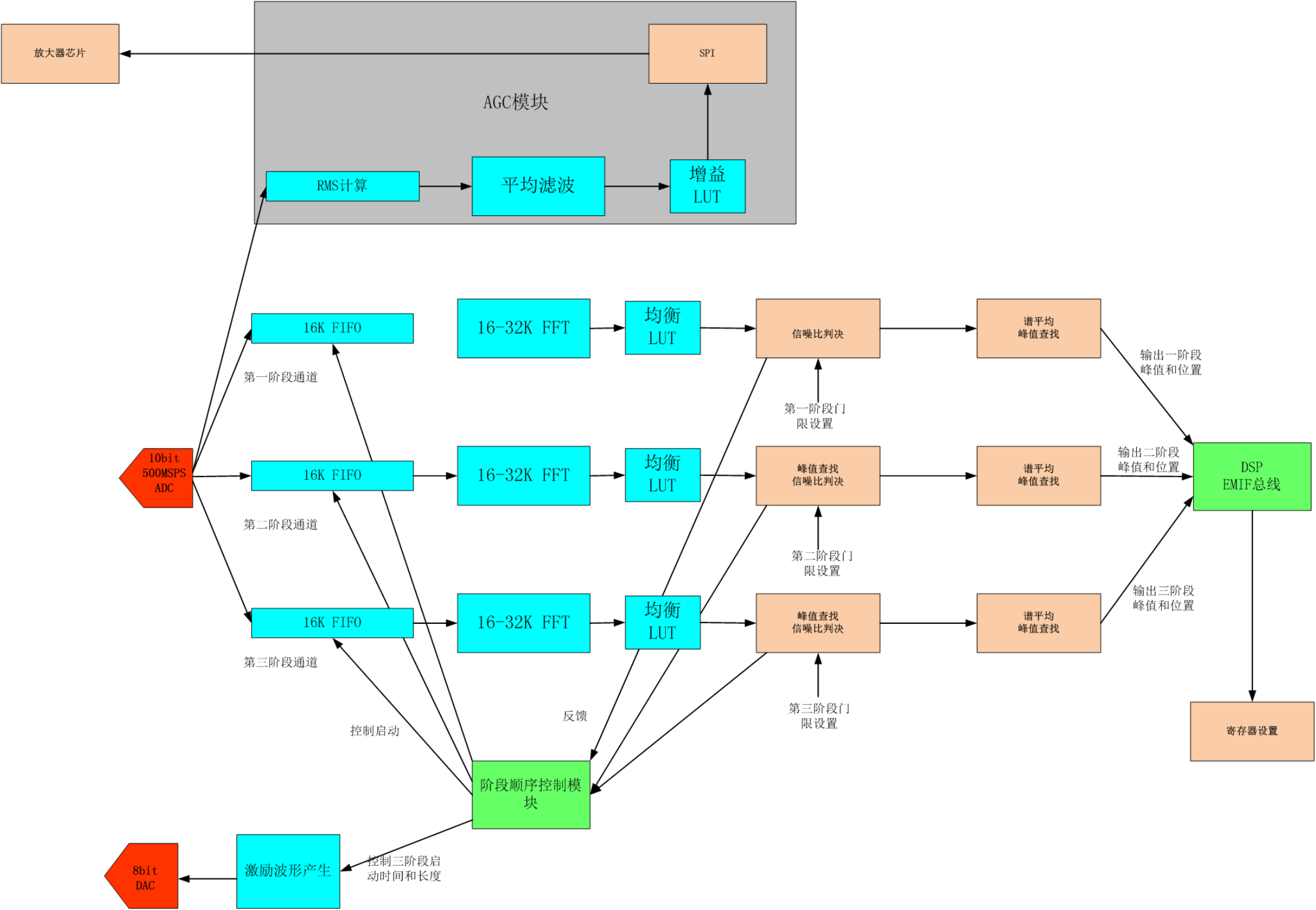
3.1 逻辑总体设计框图:
3.2 激励激光器的调制波形如下:
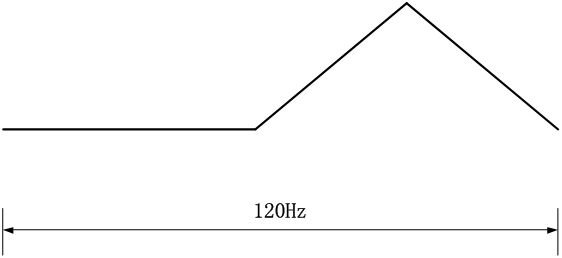
分为三个阶段:平直部分6.3ms;上升部分1mS;下降部分1mS。(有可能以后会有微调,如平直部分7.3ms,上升部分0.5mS,下降部分0.5mS,波形幅度,峰峰值1~4V可调。
根据三个不同阶段分别采集一段数据,再将这些数据实时进行FFT计算:
3.4 并行FFT计算:
根据测算,P1阶段16384个点的FFT次数约为96次,P2和P3阶段的16384点FFT次数约为34次左右。采集数据率为1000Msps,FFT实时工作频率为250MHz,这就需要4通道FFT并行计算才能满足数据的实时要求。
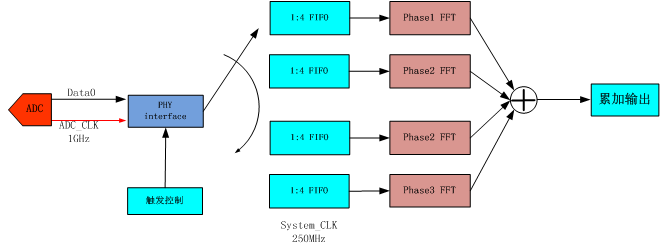
实时FFT系统架构
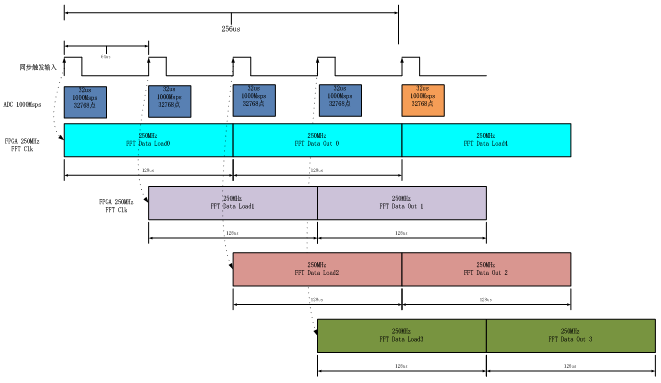
在1G采样率下最大32K点FFT的数据处理方式如下:
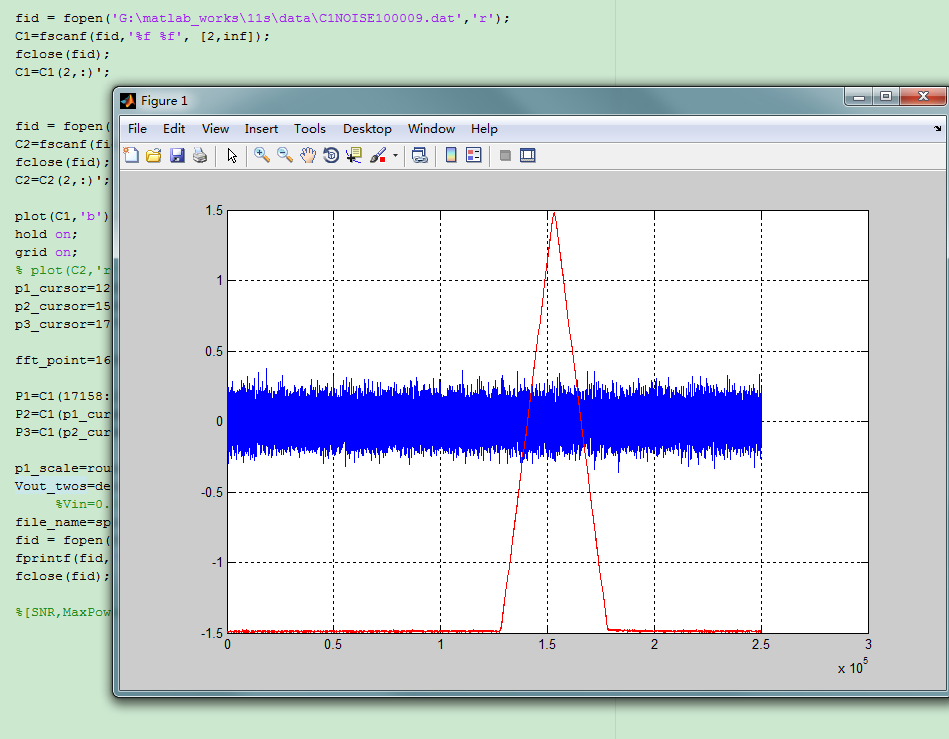
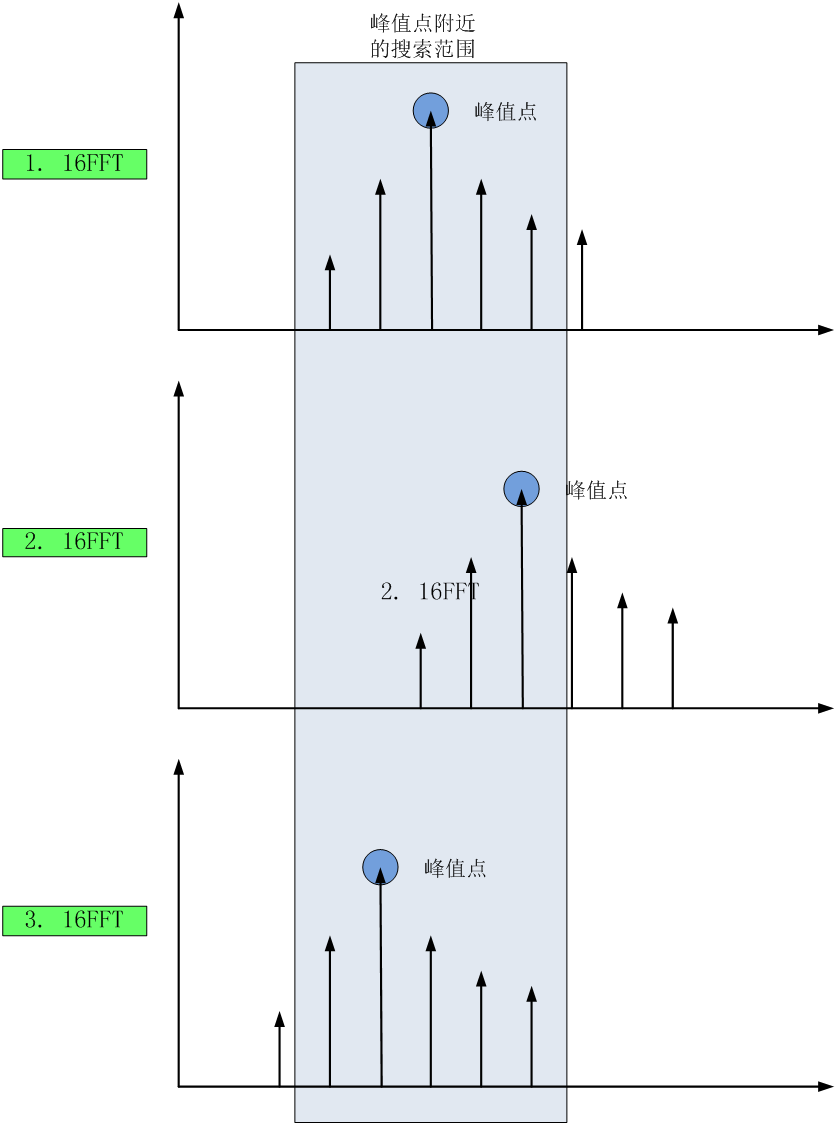
3.5 峰值查找和频偏计算:
以第一阶段为基准,通过谱平均和功率判决找到第二阶段和第三阶段相对第一阶段的频偏和方向(正负频偏),如下图所示:
3.6 自动信号增益控制:
由于随着目标距离越来越远,反馈的信号会越来越弱,这就需要自动增益控制来控制前端放大器的增益,来保障最大的系统信噪比。
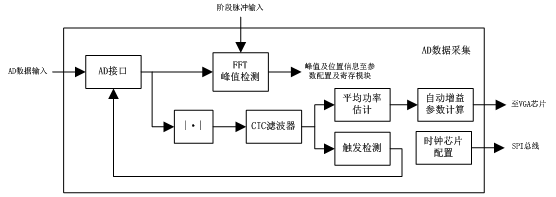
AGC的实现框图
不是您要的方案?
给我们留言吧,我们将为您提供定制解决方案




 QT1509RF射频信号采集回放卡
QT1509RF射频信号采集回放卡
 QT1140
QT1140
 QT1135DC
QT1135DC
 QT7130
QT7130


